|
Hello! I am currently a senior perception engineer at Aeva working on developing machine learning products for lidar data. Previously, I worked as a computer vision research engineer at Path Robotics to build the perception stack for autonomous robotic welding. In another life I was a research assistant at the Robotics Institute (RI) at Carnegie Mellon University where I completed my masters thesis with Prof. David Held at CMU. I study machine learning algorithms that enable robots to perceive and interact with the real world. Contact: gauthamnarayn (at) gmail.com Resume / GitHub / Google Scholar / LinkedIn |

|
|
|
| Nov 2022 : Joined Aeva as a senior perception engineer to work on ML models for Lidar data |
| June 2022 : Carnegie Mellon SCS wrote an article on our work in Robotic Pouring - [Link] |
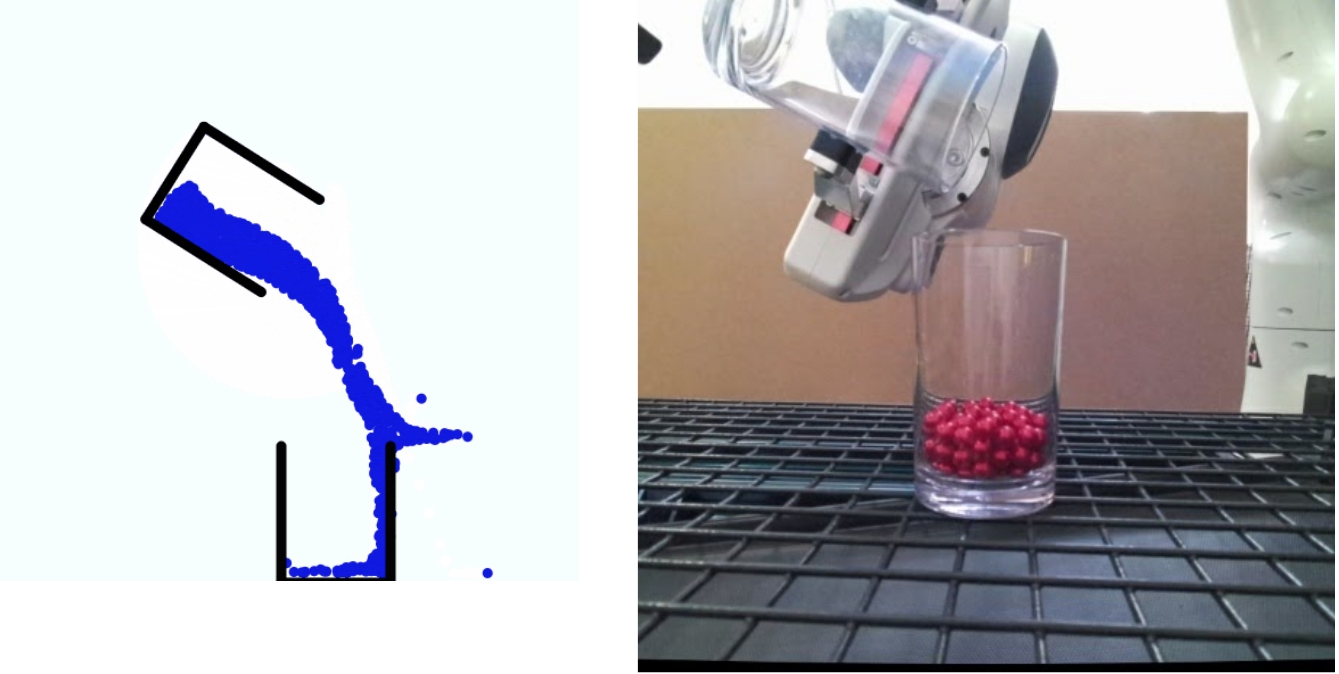
| Jan 2022 : Self-supervised Transparent Liquid Segmentation for Robotic Pouring accepted to ICRA 2022! |
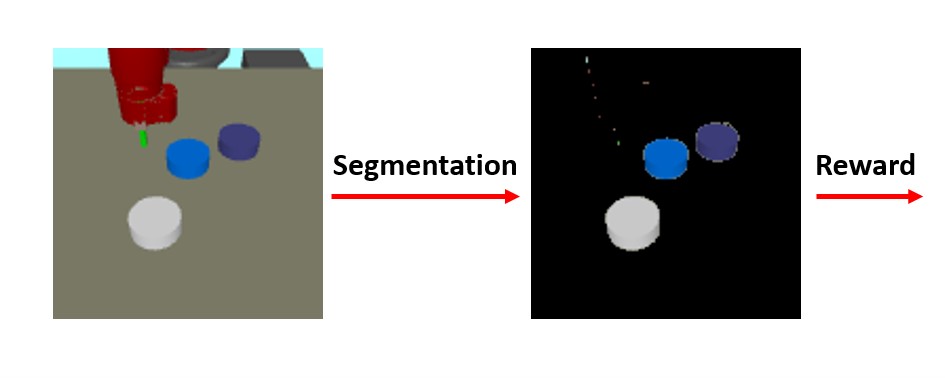
| Oct 2020 : ROLL: Visual Self-Supervised Reinforcement Learning with Object Reasoning accepted to CoRL 2020! |
|
|
| July 2022 : Intel Embodied AI Lab - Transparent Liquid Image Segmentation For Robotic Pouring [Slides] |
|
|
|
Gautham Narayan, Xingyu Lin, David Held In progress Currently training a Material Point Method based differentiable simulator to learn material properties. Cross Entropy Method has shown good performance for trajectory optimization once the material properties have been learnt. More details coming soon ... |

|
Gautham Narayan, Kai Zhang, Ben Eisner, Xingyu Lin, David Held ICRA 2022 and abridged at NeurIPS 2021 Deep Generative Models Workshop A novel segmentation pipeline that can segment transparent liquids such as water from a static, RGB image without requiring any manual annotations. We show that this system can run in real-time and aid in tasks such as robotic pouring. [Paper] [Website] [Code] |
|
Yufei Wang*, Gautham Narayan*, Xingyu Lin, Brian Okorn, David Held * denotes equal contribution Conference on Robot Learning, CoRL 2020 Unknown object segmentation to learn a visual representation that can reason about occlusions. Our method achieves state of the art on object manipulation benchmarking tasks. [Paper] [Website] [Code] |

|
Gautham Narayan, David Held Master's Thesis - Carnegie Mellon University, 2020 |

|
Gautham Narayan, Bill Eddy Internal Report - NIST Center of Excellence in Forensic Science, 2020 |
|
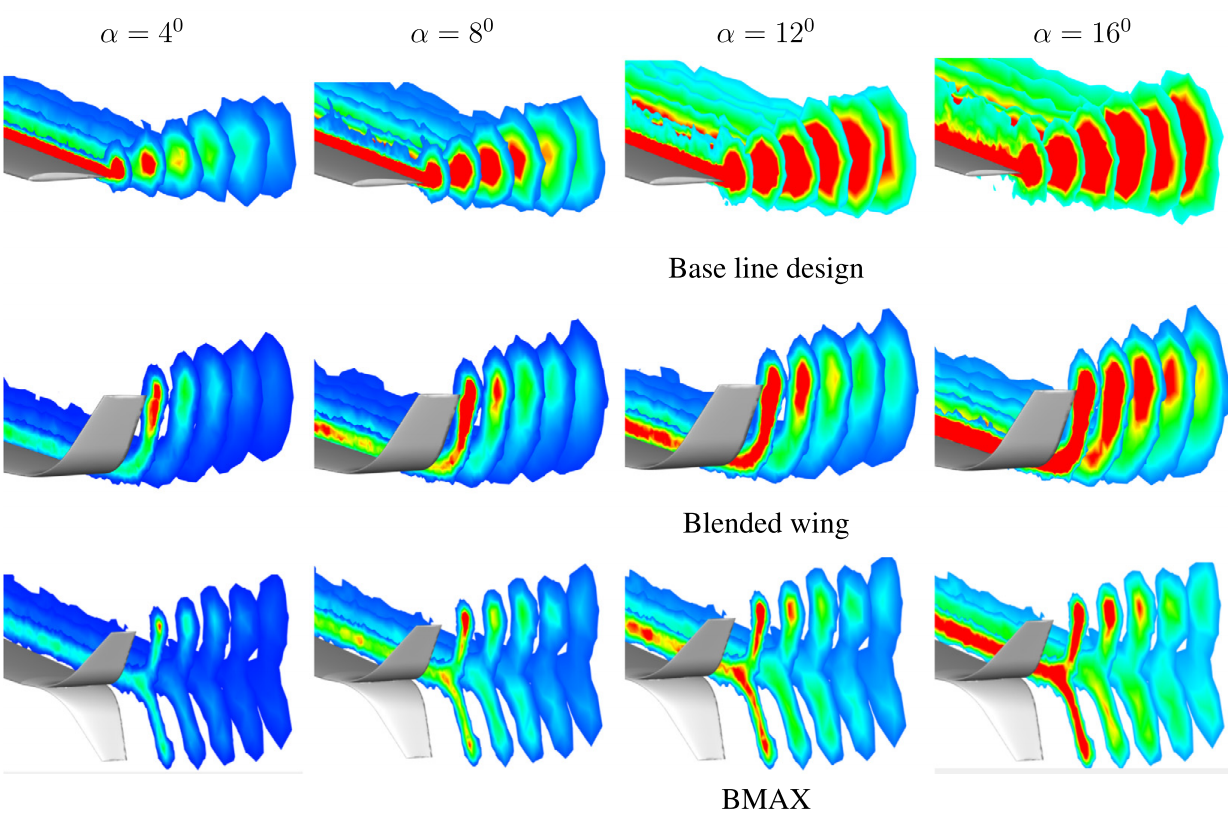
Gautham Narayan, Bibin John Elsevier - Aerospace Science and Technology, 2016 Design optimization for subsonic winglets using computational fluid dynamics. [Paper] |
|
|